
Artist’s conception of the Curiosity rover vaporizing rock on Mars. The rover landed on Mars in August 2012.
A Mars rover is an automated motor vehicle that propels itself across the surface of the planet Mars upon arrival. Rovers have several advantages over stationary landers: they examine more territory, and they can be directed to interesting features, they can place themselves in sunny positions to weather winter months, and they can advance the knowledge of how to perform very remote robotic vehicle control.
There have been four successful robotically operated Mars rovers. The Jet Propulsion Laboratory managed the Mars Pathfindermission and its now inactive Sojourner rover. It currently manages the Mars Exploration Rover mission’s active Opportunityrover and inactive Spirit, and, as part of the Mars Science Laboratory mission, the Curiosity rover. On January 24, 2016 NASA reported that current studies on Mars by the Curiosity and Opportunity rovers will now be searching for evidence of ancient life, including a biosphere based on autotrophic, chemotrophic, and/or chemolithoautotrophic microorganisms, as well as ancient water, including fluvio-lacustrine environments (plains related to ancient rivers or lakes) that may have been habitable.[1][2][3][4]The search for evidence of habitability, taphonomy (related to fossils), and organic carbon on Mars is now a primary NASAobjective.[1]
Mars 2, Mars 3, Beagle 2 were all physically tethered probes, Sojourner was dependent on Mars Pathfinder base station for communication with Earth, while MER-A & B, Curiosity, were on their own. Of these MER-B and Curiosity are still active, and MER-A and Sojourner completed their missions before losing contact in 2010 and 1997 respectively.
Contents
[hide]
Missions

Seven rovers have been dispatched to Mars:
 Mars 2, Prop-M rover, 1971, Mars 2 landing failed taking Prop-M with it. The Mars 2 and 3 spacecraft from the USSR had identical 4.5 kg Prop-M rovers. They were to move on skis while connected to the landers with cables.[5]
Mars 2, Prop-M rover, 1971, Mars 2 landing failed taking Prop-M with it. The Mars 2 and 3 spacecraft from the USSR had identical 4.5 kg Prop-M rovers. They were to move on skis while connected to the landers with cables.[5]- Mars 3, Prop-M rover, 1971, lost when Mars 3 lander stopped communicating about 20 seconds after landing.[5]
- Sojourner rover, Mars Pathfinder, landed successfully on July 4, 1997. Communications were lost on September 27, 1997.
- Beagle 2, Planetary Undersurface Tool, lost with Beagle 2 on deployment from Mars Express in 2003.[6] A compressed spring mechanism was designed to allow movement across the surface at a rate of 1 cm per 5 seconds[6] and to burrow into the ground and collect a subsurface sample in a cavity in its tip.
- Spirit (MER-A), Mars Exploration Rover, launched on June 10, 2003 at 13:58:47 EDT[7] and landed successfully on January 4, 2004. Nearly 6 years after the original mission limit, Spirit had covered a total distance of 7.73 km (4.80 mi) but its wheels became trapped in sand.[8] Around January 26, 2010, NASA conceded defeat in its efforts to free the rover and stated that it would now function as a stationary science platform.[9] The last communication received from the rover was on March 22, 2010, and NASA ceased attempts to re-establish communication on May 25, 2011.[10]
- Opportunity (MER-B), Mars Exploration Rover, launched on July 7, 2003 at 23:18:15 EDT[7] and landed successfully on January 25, 2004. Opportunity surpassed the previous record for longevity of a surface mission to Mars as of May 20, 2010 and surpassed the previous record for distance traveled off-Earth as of July 28, 2014 by covering a total distance of 40.25 km (25.01 mi).[11][12][13][14] Opportunity is still operational and mobile as of April 16, 2018.
- Curiosity, Mars Science Laboratory (MSL), by NASA, was launched November 26, 2011 at 10:02 EST[15][16] and landed in the Aeolis Palus plain near Aeolis Mons (informally “Mount Sharp”)[17][18][19][20] in Gale Crater on August 6, 2012, 05:31 UTC.[21][22][23] The Curiosity rover is still operational as of April 16, 2018.

Planned
Examples of instruments

Curiosity’s (MSL) rover “hand” featuring a suite of instruments on a rotating “wrist”, “Mount Sharp” is in the background (September 8, 2012).

Opportunity‘s first self-portrait including the camera mast on Mars
(February 14−20, 2018 / sols 4998−5004) It was taken with its microscopic imager instrument
Examples Landed instrumentation (Rovers)
- Alpha particle X-ray spectrometer (MPF + MER + MSL)
- CheMin (MSL)
- Chemistry and Camera complex (MSL)
- Dynamic Albedo of Neutrons (MSL)
- Hazcam (MER + MSL)
- MarsDial (MER + MSL)
- Materials Adherence Experiment (MPF)
- MIMOS II (MER)
- Mini-TES (MER)
- Mars Hand Lens Imager (MSL)
- Navcam (MER + MSL)
- Pancam (MER)
- Rock Abrasion Tool (MER)
- Radiation assessment detector (MSL)
- Rover Environmental Monitoring Station (MSL)
- Sample Analysis at Mars (MSL)
Locations of Mars rovers, in context[edit]
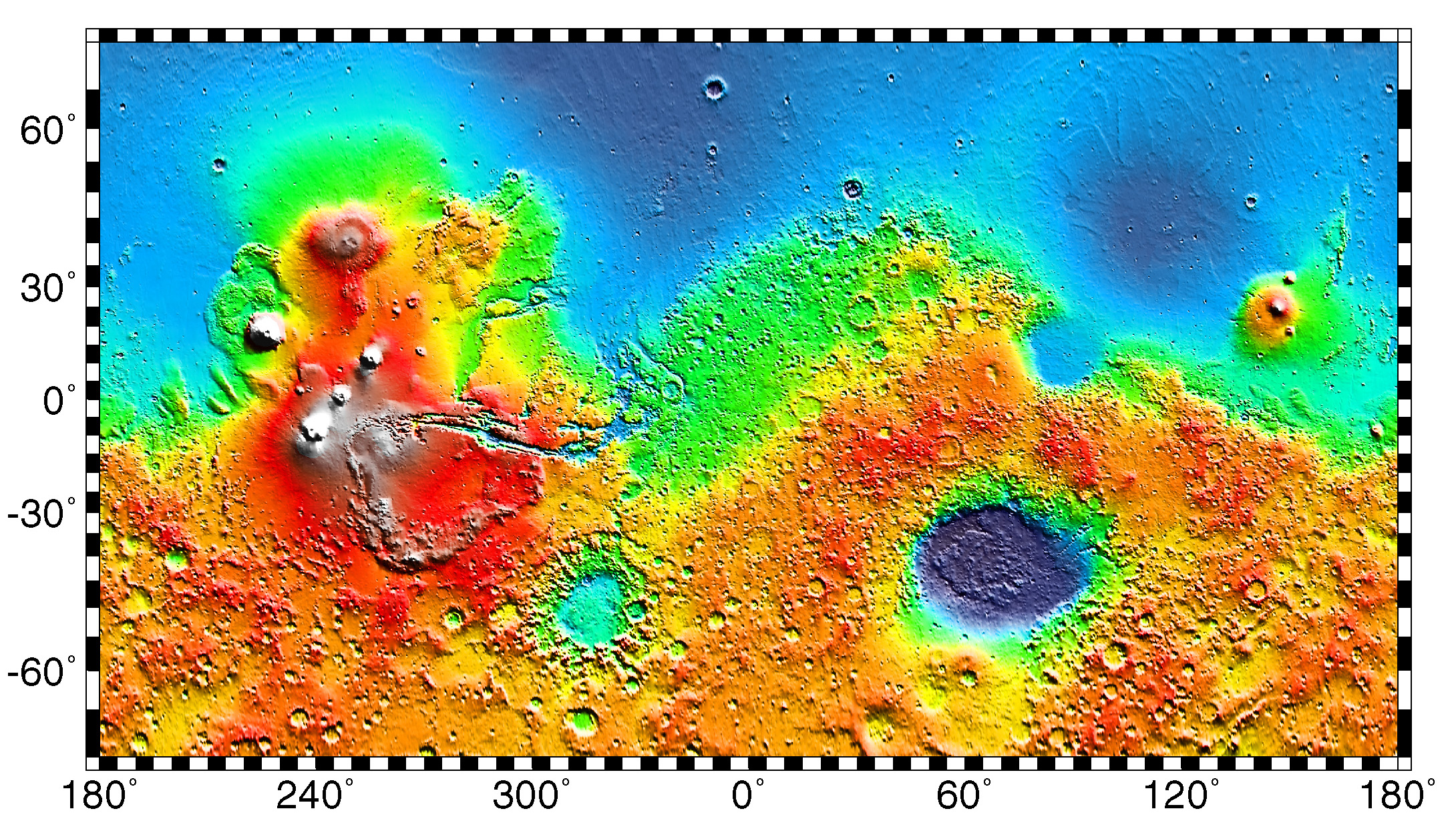
Interactive imagemap of the global topography of Mars, overlain with locations of Mars landers and rovers(Red label = Rover; Blue label = Lander; bold red/blue = currently active). Hover your mouse to see the names of over 25 prominent geographic features, and click to link to them. Coloring of the base map indicates relative elevations, based on data from the Mars Orbiter Laser Altimeter on NASA’s Mars Global Surveyor. Reds and pinks are higher elevation (+3 km to +8 km); yellow is 0 km; greens and blues are lower elevation (down to −8 km). Whites (>+12 km) and browns (>+8 km) are the highest elevations. Axes are latitude and longitude; Poles are not shown.
Concepts

DRMA 5.0 “commuter” Mars base, Chemical Propulsion Option (2009)
Mars rovers in development include:
- ExoMars, by the ESA. Planned Mars launch 2018.[24] The rover will use stained glass to prevent UV from changing image colors, allowing for true color images of the surface of Mars.[25]
- Chinese Mars Rover, has been planned for a pre-2020 launch, as part of a sample-return mission.[26]
- MESR (Mars Exploration Science Rover), REX (Robot EXplorer), and MRPTA (Micro-Rover Platform with Tooling Arm) have a target destination of Mars, planned by the Canadian Space Agency (CSA).[27]
- Mars 2020, a NASA rover based on the current rover Curiosity and planned to launch in 2020.
- 2020 Chinese Mars Mission, would include an orbiter, lander and small rover.
One experimental design, not proposed for any actual mission, is:
- Mars Tumbleweed Rover, a wind-propelled rover.[28]
Many Mars Design Reference Mission include rovers as do some Mars sample return (see MAX-C)
Cancelled or stale rover mission designs/proposals

Mock-up of canceled Mars Surveyor 2001 rover, tabled after the triple failure of Mars Polar Lander, Deep Space 2, and Mars Climate Orbiter in the late 1990s
- Astrobiology Field Laboratory, proposed in the 2000-2010 period as a follow on to MSL.[29]
- Mars Astrobiology Explorer-Cacher (MAX-C), cancelled 2011[30][31]
- Mars Surveyor 2001 rover, [32]
NASA Mars rover goals (circa 2010s)
NASA distinguishes between “mission” objectives and “science” objectives. Mission objectives are related to progress in space technology and development processes. Science objectives are met by the instruments during their mission in space.
The details of rover science vary according to equipment carried. The primary goal of the Spirit and Opportunity rovers is to discover “the history of water on Mars”.[33] (The presence of usable water would greatly reduce manned mission cost.)
The four science goals of NASA’s long-term Mars Exploration Program are:
- Determine whether life ever arose on Mars
- Characterize the climate of Mars
- Characterize the geology of Mars
- Prepare for human exploration of Mars[34]

Panorama of Husband Hill taken by the Spirit rover (November, 2005).
Gallery
- Mars Rovers
-
Sojourner rover on Mars.
-
Sojourner rover atop Pathfinder lander.
-
Comparison: Mars Sojournerrover, MER, MSL.
-
Comparison: MER, Sojournerrover, MSL.
-
Comparison: MER, Sojournerrover, MSL.
-
Concept: Manned Mars rover.
-
Martian sunset viewed by the Spirit rover (May 2005).








Opportunity rover later visited its heat shield impact site; it was ejected during the rover’s descent and impacted the surface separately.